Robotique pédagogique et Lego: combiner la technique, le ludique et l’éthique
J’ai enseigné pendant 23 ans dans le programme de Techniques d’électronique industrielle au Cégep de Lévis-Lauzon. Je m’intéresse depuis longtemps à la robotique et j’ai parfait mes connaissances de manière autodidacte au fil des ans. Lors de la fusion des 2 options de sortie en électronique industrielle (Électrodynamique, Instrumentation et automatisation), chaque cégep élaborait une grille de cours en fonction des 19 compétences ministérielles. C’est dans cette optique que le département a introduit le cours Positionnement et robotique en 2008. Puis, en 2014, une attestation d’études collégiales en Robotique industrielle a vu le jour au Cégep de Lévis-Lauzon suite à des travaux menés avec le Cégep de Victoriaville.
Je jonglais depuis quelques années avec l’idée d’offrir un cours d’introduction à la robotique pédagogique. Une occasion de concrétiser ce projet s’est présentée lors de la réforme des cours complémentaires au Cégep de Lévis-Lauzon en 2005. Les étudiants devaient choisir parmi la liste de cours du bloc complémentaire et pouvaient provenir de n’importe quel programme (excepté génie mécanique et électronique industrielle, puisque ces 2 programmes contiennent déjà des cours de robotique).
Pour que le cours de robotique soit retenu parmi la liste des cours complémentaires, il fallait trouver une façon de rendre le sujet attrayant. Les groupes auxquels j’enseignais jusqu’à présent étaient surtout formés d’étudiants en provenance du secondaire et ayant déjà, pour la plupart, certaines connaissances technologiques. Je voulais rendre la robotique accessible aux étudiants de toutes les disciplines, peu importe leur niveau d’habileté technologique préalable.
J’ai travaillé en collaboration avec Gilles Leblanc, conseiller pédagogique, à la mise en oeuvre de ce projet. Nous avons décidé de nommer le nouveau cours Légorobotisation, une combinaison entre les blocs Lego et la robotique.
Nous voulions que le titre et la description du cours fassent appel à des notions comme l’enfance et le jeu, pour qu’ils soient associés à quelque chose de positif. Notre objectif était d’intéresser une population étudiante variée à l’électronique et à la robotique, à partir de matériel qui leur est déjà familier et qui n’est pas difficile à apprendre. Nous voulions faciliter la connaissance.
Il existe plusieurs produits de robotique pédagogique sur le marché, qui exigent ou non de faire de la programmation :
- Les robots que l’on programme sont très diversifiés et polyvalents. Il existe différents modèles : une recherche internet vous en fera découvrir une grande quantité. (educational robot kit ou kit robotique).
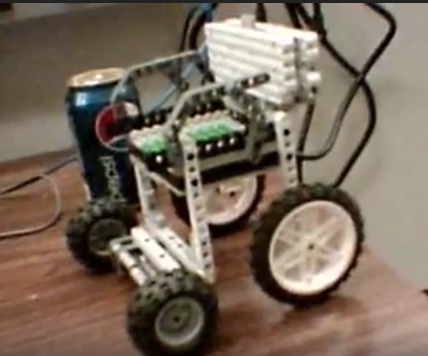
- Les robots qui n’exigent pas de programmation obéissent à une manette qui commande les différents moteurs pour déplacer les parties du robot (marche, pince, bras). Les fonctions sont donc limitées.

Un exemple de robot qui n’exige pas de programmation de la part de l’utilisateur. Le robot répond aux commandes de la manette.
Pour ce cours d’introduction, nous avons retenu le logiciel Mindstorm RCX, puisqu’il est compatible avec les blocs Lego. Les étudiants pouvaient même apporter les leurs! Dès la première année, nous avons réussi à rejoindre des étudiants de différents domaines.

La brique Lego Mindstorm RCX. Elle possédait une application graphique permettant d’exécuter des commandes.
Découvrir la robotique par des défis ludiques
Chaque semaine, je proposais un thème différent dans mon cours avec un degré de difficulté plus élevé (et une tâche différente à exécuter). Par exemple :
- En début de session, on commence par les moteurs: l’étudiant doit réussir à faire rouler son robot.
- On ajoute ensuite un niveau de difficulté avec l’utilisation de capteurs, qui permet au robot de suivre un trajet. Dans ce cas, on utilisait un capteur qui émet une lumière et c’est la réflexion qui donne une indication de la surface sur laquelle le robot se déplace. Généralement, on utilise une ligne sombre (comme du ruban électrique noir) sur une surface plus pâle.
- Plus tard dans la session, les étudiants voient la notion de bipédie, qui consiste à articuler un robot à 2 pattes. Les étudiants découvrent alors qu’il n’est pas facile de faire marcher un robot!
Pour réaliser ces tâches, les étudiants apprenaient à programmer leur robot à partir d’un logiciel leur permettant de déplacer des « cubes » et de poser des actions (un peu comme le fait Scratch pour initier les utilisateurs à la programmation). La programmation graphique est plus simple à utiliser et facilement compréhensible.
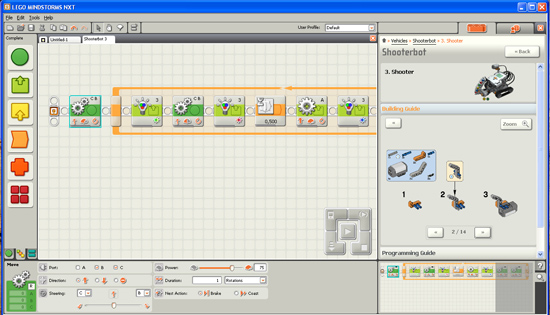
L’interface de programmation graphique du logiciel Lego Mindstorm NXT.
En ce qui concerne les habiletés techniques des étudiants, je n’ai pas constaté de rupture significative entre leurs profils disciplinaires : peu importe leur programme de formation, les étudiants comprenaient rapidement le côté technique.
Le but du cours de robotique n’est pas de faire de la programmation, mais d’apprendre à résoudre un problème technologique. Une année, les étudiants devaient robotiser un fauteuil roulant à partir d’un cahier de charges comprenant certaines contraintes. Le robot devait notamment soulever et déplacer une canette vide. Il devait également résister au « test destructif » (est-il suffisamment résistant si l’enseignant l’échappe par terre?).
Exemple de réalisation étudiante : un fauteuil roulant en blocs Lego.
Par la suite, j’ai demandé aux étudiants de modifier leur fauteuil roulant pour en faire un appareil tout-terrain. Devant cette nouvelle contrainte, les étudiants ont proposé des solutions variées :
- Utilisation de chenille
- Ajout de moteurs
- Une personne a même utilisé un système de leviers pour générer une force motrice, après avoir visionné une conférence TED montrant ce type de produit.
Conférence TED d’Amos Winter : The cheap all-terrain wheelchair (2012).
L’évaluation de mi-session consiste à faire suivre un trajet par le robot. Les étudiants avaient 2 semaines pour se préparer.
La première semaine, je les laissais travailler en équipe (mais ils pouvaient me contacter à distance). La première fois, je m’attendais à un haut taux d’absentéisme. J’avais des «espions» qui m’ont confirmé, à ma grande surprise, que tous les étudiants étaient présents au laboratoire d’électronique pour travailler sur leur robot!
La semaine suivante, le robot devait réussir le trajet proposé. Les étudiants travaillaient en équipe, mais l’évaluation était individuelle. Chacun avait un trajet différent de celui de son coéquipier et du trajet de pratique de la semaine précédente, puisque l’objectif du cours est d’amener l’étudiant à résoudre un problème à partir d’éléments connus.
Les projets de fin de session sont plus complexes. Souvent, ils requièrent la collaboration de l’ensemble des équipes. Au fil des ans, j’ai varié les défis :
- Bras articulé: Les 8 équipes avaient chacune un bras articulé qui devait attraper une balle et la donner au robot suivant. Les équipes devaient collaborer entre elles, puisque pour réussir la séquence, les étudiants devaient définir des actions à la chaîne et bien les synchroniser.
Synchroniser des robots : plus difficile qu’il n’y paraît! Les étudiants devaient réussir une séquence dans laquelle les robots saisissent et déplacent des balles de couleur.
- « Vague mexicaine » : Une variation à partir des bras articulés. Le projet nécessitait de calculer le temps de départ du premier robot et de parvenir à une synchronisation avec les robots suivants pour créer un mouvement de vague. Il y en avait toujours un en retard ou à l’envers des autres : les étudiants ont trouvé cela très drôle!
- Course de dragsters: Ce projet visait à expérimenter avec la notion de puissance pure. Les étudiants commençaient par un modèle de base et pouvaient par la suite tenter d’améliorer la performance de leur bolide (le temps entre la ligne de départ et la ligne d’arrivée). Les étudiants aimaient beaucoup les compétitions amicales : nous avons même affiché un tableau des meilleurs temps.
Une course de dragsters dans les couloirs du Cégep.
- Déplacement téléguidé: Un autre montage collaboratif était dans la communication Bluetooth (comme les oreillettes pour cellulaire). Une équipe montait un véhicule, tandis qu’une autre réalisait une manette de guidage. Le but était de vérifier la portée de la communication Bluetooth. Les étudiants qui le désiraient et qui avaient un téléphone cellulaire pouvaient télécharger une application pour remplacer la manette.
Les étudiants bénéficiaient d’une grande liberté dans la présentation finale de leur robot. Un même projet pouvait mener à différents résultats qui reflétaient parfois les domaines d’études des étudiants (par exemple, l’esthétisme du robot était plus présent chez les étudiants dans des programmes artistiques).
Éthique, intelligence artificielle et philosophie
La première année, le cours de robotique pédagogique a été offert en collaboration avec Jean Schmouth, enseignant de philosophie au Cégep de Lévis-Lauzon. Je n’ai jamais aimé travailler en silos : je préfère travailler avec les autres et développer des projets communs. Tous les étudiants font de la philosophie au cégep, alors pourquoi ne pas les impliquer de manière concrète ?
Il y a plusieurs questions d’éthique qui se posent quant à la robotisation et à l’intelligence artificielle. C’était déjà le cas en 2005, c’est encore plus d’actualité aujourd’hui. L’apport de la philosophie dans ce domaine est important.
Les robots font partie de notre environnement. Nous les retrouvons notamment :
- Dans les salles d’opération (la robotique médicale permet une plus grande précision)
- Dans nos maisons (objets domestiques robotisés comme les aspirateurs Roomba, les appareils intelligents, la domotique)
- Dans la voiture (avec une intelligence artificielle comme Siri)
Les milieux professionnels et éducatifs s’intéressent de plus en plus aux robots de téléprésence.
Aux États-Unis, le MIT développe des robots « sociaux » capables d’imiter les expressions humaines. Plusieurs pays développent également des prototypes de robots d’assistance et de soins (par exemple pour les personnes handicapées, malades ou âgées). Dans ce contexte, il y a toute une dimension de la relation de l’humain avec le robot, voire de la relation affective avec les robots, qui mérite d’être explorée.
Leonardo, un robot « social » développé au MIT.
Présentation d’ASIMO, un robot humanoïde conçu pour porter assistance aux personnes à mobilité réduite. Pour l’instant, il est utilisé à des fins promotionnelles seulement.
À l’autre bout du spectre, l’utilisation de drones ou de robots dans des contextes militaires, où il devient possible d’intervenir à distance par l’intermédiaire de machines (presque comme dans un jeu vidéo), apporte également son lot de questionnements éthiques.
Pour permettre aux étudiants de réfléchir à ces questions, Jean et moi avons organisé une activité spéciale le vendredi précédent la semaine de lecture. Nous avons invité des enseignants d’autres disciplines, notamment en génie mécanique et en sciences humaines, à participer. Chaque enseignant présentait brièvement un sujet en lien avec l’humain et les robots. Les étudiants étaient ensuite invités à en débattre. Gilles Leblanc était aussi présent, à titre de modérateur.
Des exemples de questions pour les débats
La combinaison de la robotique et de la philosophie constitue une valeur ajoutée :
- Aux étudiants des domaines techniques, elle permet de réfléchir aux enjeux éthiques et aux impacts des machines sur les humains, notamment dans la sphère socioaffective.
- Aux étudiants des domaines moins « techniques », elle permet de comprendre la machine, d’en apprendre le fonctionnement et de démystifier l’aspect technique.
Il est important que les étudiants, quel que soit leur programme d’études, comprennent que les robots ne sont avant tout que des machines et qu’on peut toujours les désactiver. Souvent, ce qu’on ne connaît pas fait peur. Notre approche multidisciplinaire visait à offrir une vision d’ensemble, à la fois sur les aspects techniques et éthiques.
Les avantages de la robotique pédagogique pour les étudiants
Ce cours d’introduction à la robotique a permis de soutenir différents types d’apprentissage et d’habiletés pour les étudiants :
- Manipulation fine: par l’utilisation des blocs Lego et des composantes de petites dimensions des automates.
- Réflexion technique : en apprenant à résoudre un problème en tenant compte de différentes composantes, comme la structure, la solidité et la pérennité de l’objet.
- Réflexion éthique : en débattant des implications éthiques de la robotisation et de l’intelligence artificielle.
- Processus de développement d’un produit : les projets que devaient réaliser les étudiants leur permettaient de passer à travers toutes les étapes de développement :
- ldentification d’un besoin
- Développement d’un prototype : fonctionnement, choix des matériaux
- Pilotage
- Mise en marché ou amélioration du produit
Par son aspect ludique et son contenu, ce cours est un peu « hors norme ». La motivation des étudiants est élevée et se traduit par un taux de participation tout aussi élevé, même dans un contexte où la présence des étudiants n’est pas obligatoire.
En début de session, j’avais l’habitude de faire un sondage à main levée pour savoir si le cours était le premier choix des étudiants. Souvent, il s’agissait d’un 1er choix pour la majorité d’entre eux, mais les étudiants pour qui il s’agissait du 2e ou du 3e choix étaient tout aussi contents à la fin de la session!
Enseigner la robotique dans les collèges
On compte par millions le nombre de robots industriels dans le monde. Les autres types de robots (de service, de téléprésence, militaire, domestique, en éducation…) sont en pleine croissance. Plusieurs objets portent le nom de robot, mais en sont-ils vraiment (robot culinaire)? Il faut également inclure à cette liste les objets connectés qui se chiffrent en milliards (grille-pain, thermostat, lumières …) : sans être des robots, ces objets font partie de notre quotidien. Il est donc nécessaire d’avoir une connaissance du fonctionnement de ces robots et objets.
J’oserais dire que nous devons savoir communiquer avec ces objets que nous devons gérer. Les langages de communication deviennent plus simples pour être accessibles au plus grand nombre. Je crois important de parler de robotique à tous les niveaux d’enseignement, puisque la technologie change très rapidement. Il existe une panoplie de systèmes accessibles pour tous.

Moi qui étais déjà une fan affirmée de M. Labbé après avoir lu son premier récit en 2012: http://eductive.ca/j-assiste-au-cours-peu-importe-le-lieu-et-le-moment
Ce deuxième texte confirme mon enthousiasme!
Je seconde ! Jean Labbé avait fait un très beau témoignage lors du laboratoire sur la robotique pédagogique organisé par la Vitrine technologie-éducation (VTÉ) à l’hiver 2016 et dont voici la synthèse : http://eductive.ca/synthese/quelle-est-la-place-de-la-robotique-pedagogique-au-sein-de-leducation
Toujours très intéressant à lire Jean Labbé. Merci d’avoir partagé avec nous
Très intéressant! Et extrêmement motivant! On aurait envie de retourner à l’école juste pour pouvoir tester tout cela en direct avec M. Labbé! 🙂
À l’époque (en 2007) on en parlait dans le Cégep comme d’un cours très « cool »! Personnellement j’étudiais en informatique industrielle, donc on travaillait avec des « vrais » bras robotisés. D’ailleurs, mon projet de session a été de combiner mon projet de dessin sur ordinateur (d’une session précédente) à un bras robotisé qui reproduisait le dessin en temps réel.